商機詳情 -
寧夏企業目標識別軟件
多目標跟蹤是指在連續的圖像中,通過目標檢測算法識別出每一幀中的目標,并在時間上跟蹤它們的位置和狀態。但目標會不斷發生尺度、形變、遮擋等變化,而且還會有目標出現和消失的情況,再加上視頻采集端的相機所處環境可能受到外界影響導致抖動的情況(例如無人機高空檢測),就會給多目標跟蹤造成一定的困難。由于我們不能控制目標,所以只能從視頻采集端維護跟蹤的穩定性。因此,成都慧視針對于多目標檢測跟蹤抖動丟失的優化方法是:1.改進目標檢測,使用更加魯棒的目標檢測算法。2.增強特征描述,利用深度學習提取更高級別的語義特征,這些特征對于小范圍內的視角變化具有更好的不變性3.改進運動模型,在算法中加入對攝像頭運動的估計,通過補償攝像頭運動來減小目標真實運動與預測之間的差距。4.數據關聯策略,設計更靈活的數據關聯算法,允許更大的距離閾值來匹配候選目標。分割算法識別找慧視。寧夏企業目標識別軟件
目標識別
長時間一直進行這樣的圖像標注工作,那無疑是枯燥而乏味的,手酸不說,更多的是精神上的折磨,進而效率大打折扣。但這又是算法提升的必要途徑,無法跳過,當項目緊急時,甚至需要多人加班加點趕進度。這樣的痛苦現狀急需改變!慧視光電的算法工程師為了提高這一的效率,開發了一個深度學習算法開發平臺SpeedDP。它的基本邏輯是基于一個手動標注一定量的數據集進行訓練,形成一個可用的預選模型(如果已有模型可以直接使用),然后訓練一定階段后,可以評估此模型的能力,如果能夠滿足使用就可以對相同目標的新數據集(未進行任何標注)進行AI自動化標注。這一過程的省去了大量需要對新數據集的手動拉框工作,同時也在不斷反哺此模型算法,幫助提升性能。寧夏穩定目標識別工具慧視光電開發的圖像處理板可以用于目標識別。
目標識別算法是一種深度學習算法,其聰明程度需要我們不斷訓練,這就得益于大量的圖像標注,通過對車輛行駛環境的數據集的大量標注,能夠讓AI更加聰明,標注得越多,識別的精度就可能越高。但是大量的圖像標注跟工作顯然會耗費大量的時間精力。而慧視SpeedDP的出現很好地解決了這個問題。SpeedDP是一個深度學習AI算法訓練開發平臺,他能夠通過現有的算法模型或者自訓練一個算法模型,實現對新數據集的快速AI自動標注,以此反復,幫助使用者提升算法性能。能夠有效節約大量的時間。
無人裝備作戰狼群,有“狼”負責偵查,有“狼”負責打擊,而有的“狼”則負責后勤保障,這種無人裝備集群作戰能夠有效輔助特種作戰。“機器狼”的升級之所以能夠滿足多樣化的任務,得益于其智能化的建設。就是下面這樣的一個"智慧眼"的加入,使得機器狼能夠自主完成許多任務。這個智慧眼由光學系統(彩色圖像)、攝像機、圖像處理、電源系統及機械結構組成,然后在外面加上外殼,形成一個整體。而拆分來看,產品主要就由高清攝像機和高性能的圖像處理板組成。目標行為識別算法找成都慧視光電。

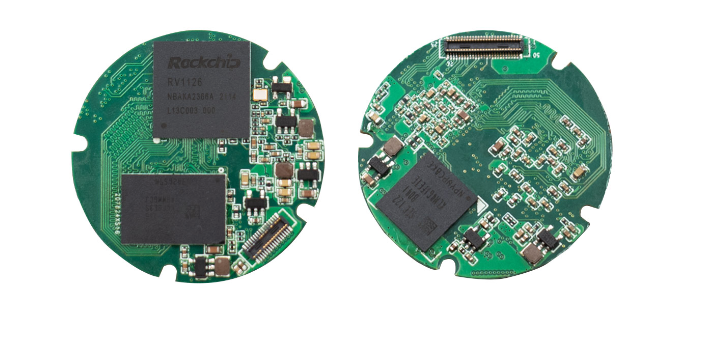
目前,采用圖像識別技術來實現無人機規避其他障礙物是一個有效的方法。通過在無人機上植入圖像識別模塊,這個模塊由圖像處理板和相機組合而成,通過算法的賦能,就能針對不同物體實現快速AI識別,然后實現規避。而在圖像處理板的選擇上,成都慧視開發的Viztra-LE026圖像處理板就十分合適。這塊板卡采用了RV1126開發設計而成,外形呈圓形,體積小巧,尺寸為Ф38mm*12mm,重量只有12g,用在無人機上不會過多占用空間。此外,該板卡功耗≤4W,也不會增加無人機的續航負擔。目標識別算法也能夠定制。河北專業目標識別情況
紅外目標跟蹤識別選哪個圖像處理板?寧夏企業目標識別軟件
RK3588作為瑞芯微旗艦級芯片,工業級的算力受到了很多領域的青睞,但是由于前端相機的選擇不同,并不是每塊RK3588的圖像處理板都可以直接拿來使用,需要的是根據相機接口和應用場景進行深度定制。成都慧視光電技術有限公司就有這樣的快速集成定制的能力。作為擁有多年圖像處理板開發經驗的團隊,成都慧視能夠快速定制SDI、CVBS、CAMERALINK、USB、LVDS、DVP等豐富接口的RK3588系列圖像處理板,并能夠根據應用環境定制外殼、散熱器等。寧夏企業目標識別軟件