新聞中心 - 無錫文亞機電自動化設備有限公司
-
 鎮江購買傳感器
鎮江購買傳感器中國傳感器產業正處于由傳統型向新型傳感器發展的關鍵階段,它體現了新型傳感器向微型化、多功能化、數字化、智能化、系統化和網絡化發展的總趨勢。傳感器技術歷經了多年的發展,其技術的發展大體可分三代:***代...
發布時間:2025.05.22 -
 什么是工業機器人常見問題
什么是工業機器人常見問題工業機器人懸臂結構極易在多軸聯動、重載及快速起停時引起抖動。機器人本體剛度要與電機伺服剛度參數相匹配,剛度過高,會造成振動,剛度過低會造成起停反應緩慢。機器人在不同的位置和姿態,以及在不同的工裝負載下...
發布時間:2025.05.21 -
浦東新區什么是傳感器
對傳感器數量和量程的選擇:傳感器數量的選擇是根據電子衡器的用途、秤體需要支撐的點數(支撐點數應根據使秤體幾何重心和實際重心重合的原則而確定)而定。一般來說,秤體有幾個支撐點就選用幾只傳感器,但是對于一...
發布時間:2025.05.20 -
 楊浦區大型工業機器人
楊浦區大型工業機器人“機械人”為深海臥龍***應用于表達變形金剛人形形態的一個詞語。 “機械人”應用于變形金剛的人形形態的表達。 可以加上“形態”、“模式”等詞語:機械人形態,機械人模式。工業“機械人”或者“機械手” 常...
發布時間:2025.05.19 -
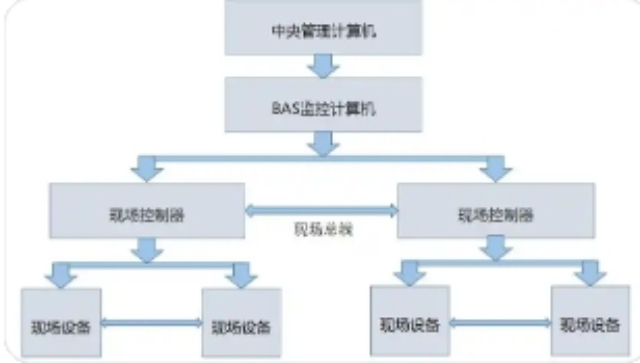 哪些自動化控制系統哪家好
哪些自動化控制系統哪家好過程自動化:石油煉制和化工等工業中流體或粉體的化學處理自動化。一般采用由檢測儀表、調節器和計算機等組成的過程控制系統,對加熱爐、精餾塔等設備或整個工廠進行比較好控制。采用的主要控制方式有反饋控制、前饋...
發布時間:2025.05.19 -
宿遷工業機器人產品介紹
工業機器人在工業生產中能代替人做某些單調、頻繁和重復的長時間作業,或是危險、惡劣環境下的作業,例如在沖壓、壓力鑄造、熱處理、焊接、涂裝、塑料制品成形、機械加工和簡單裝配等工序上,以及在原子能工業等部門...
發布時間:2025.05.18 -
 松江區大型工業機器人
松江區大型工業機器人20世紀60年代,工業機器人發展迎來黎明期,機器人的簡單功能得到了進一步的發展。機器人傳感器的應用提高了機器人的可操作性,包括恩斯特采用的觸覺傳感器;托莫維奇和博尼在世界上**早的“靈巧手”上用到了壓...
發布時間:2025.05.17