新聞中心 - 無錫文亞機電自動化設備有限公司
-
 惠山區整套工業機器人
惠山區整套工業機器人機器人的安裝是在在現場進行的,而真正的生產作業環境會受空間利用率等方面影響,致使機器人的很多姿態受到一定的限制,而這就很容易導致工業機器人在實際工作中,出現震動、移位等現象,并**終導致工業機器人無法...
發布時間:2025.06.13 -
 楊浦區哪里有工業機器人
楊浦區哪里有工業機器人20世紀50年代末,工業機器人**早開始投入使用。約瑟夫·恩格爾貝格(Joseph F.Englberger)利用伺服系統的相關靈感,與喬治·德沃爾(GeorgeDevol)共同開發了一臺工業...
發布時間:2025.06.12 -
 淮安工業機器人是什么
淮安工業機器人是什么在減速比不能較大調整的情況,電機的最高轉速則直接影響著機器人的末端速度和工作節拍;而且速比太低會影響電機的慣量匹配,因此提高電機的最高轉速也是機器人電機的關鍵技術之一。 [5]③直驅、中空隨著協作機器...
發布時間:2025.06.12 -
淮安工業機器人客服電話
控制系統的任務是根據機器人的作業指令以及從傳感器反饋回來的信號,支配機器人的執行機構去完成規定的運動和功能。如果機器人不具備信息反饋特征,則為開環控制系統;具備信息反饋特征,則為閉環控制系統。根據控制...
發布時間:2025.06.11 -
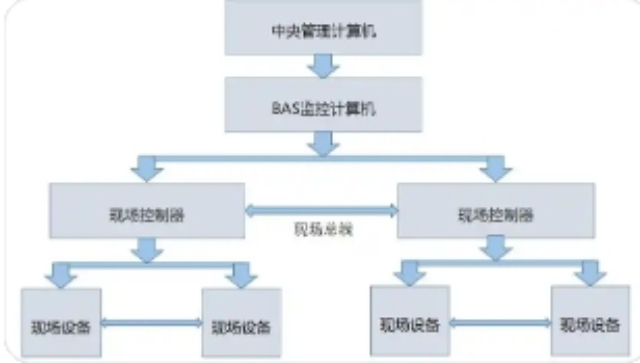 私人自動化控制系統型號
私人自動化控制系統型號根軌跡方面包括根軌跡的基本概念、繪制規則如普通根軌跡、正反饋根軌跡、參數根軌跡的繪制以及基于根軌跡的系統分析。頻域分析中頻率特性的基本概念、幅相頻率特性曲線和對數頻率特性曲線的繪制還有奈奎斯特穩定判據...
發布時間:2025.06.09 -
 徐匯區傳感器產品介紹
徐匯區傳感器產品介紹傳感器的特點包括:微型化、數字化、智能化、多功能化、系統化、網絡化,它不僅促進了傳統產業的改造和更新換代,而且還可能建立新型工業,從而成為21世紀新的經濟增長點。微型化是建立在微電子機械系統(MEMS...
發布時間:2025.06.07 -
鹽城工業機器人是什么
隨著計算機微型產業的不斷進步,“機械人”的用途越來越***。而且,“機械人”的動平衡和模仿人類各種復雜的行為動作也越來越近似。現代“機械人”或“機械生物”已經具備了聲音、視覺、知覺的所有傳感識別,并可...
發布時間:2025.06.06