商機詳情 -
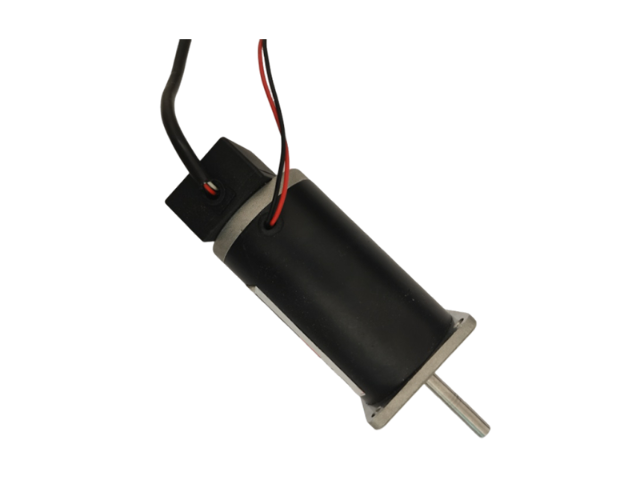
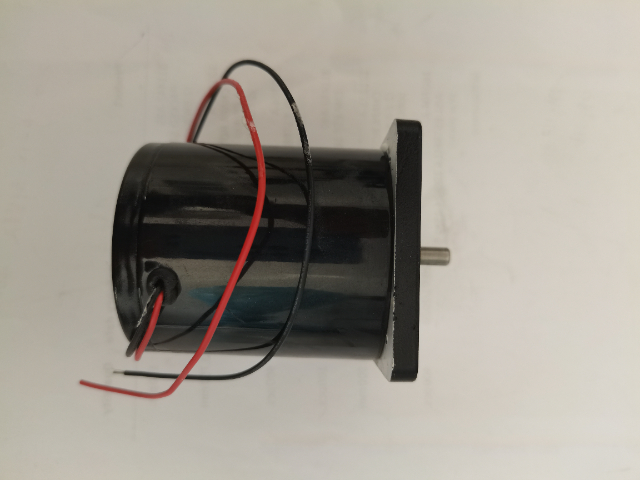
連云港60V直流電機直銷
電樞反應的影響復雜多樣,需結合電機類型和工作場景選擇補償方法。硬件補償(如繞組設計)與控制策略(如閉環調節)的結合,可有效提升電機性能與可靠性,尤其在動態負載和高效率要求的應用中。通過多技術協同與系統性設計,可提升噪聲與振動控制效率,推動工業、交通及建筑領域的可持續發展。現狀:直流電機在主流電動汽車中已被高效交流電機取代,但其在低速、低成本場景和無刷化改進中仍有特定價值。··技術趨勢:·o無刷化(BLDC)和混合勵磁技術可能擴展直流電機的應用邊界。oo交流電機(PMSM、IM)仍是電動車主驅動力系統的選擇。o·設計權衡:選擇電機類型需綜合考慮成本、效率、維護需求及車輛定位。直流電機 ,就選常州市恒駿電機有限公司,用戶的信賴之選,有想法的不要錯過哦!連云港60V直流電機直銷

微型直流電機通過小型化、高效能及環境適應性設計,在醫療、航空航天、可穿戴設備等特殊場景中展現出不可替代性。未來,其發展將聚焦于智能化控制、新材料應用與綠色制造,進一步拓展至微型機器人、柔性電子等新興領域。
空心杯直流電機的優勢,高效率與低能耗,轉子無鐵芯設計,消除了鐵損(渦流和磁滯損耗),能量轉換效率高達90%以上,適合電池驅動的移動機器人。低發熱特性延長了設備續航,并減少散熱需求。高動態響應,轉子轉動慣量極低,啟停時間短(毫秒級),加速度快,適用于需要快速精細控制的場景(如機械臂關節、無人機旋翼)。 中山24V直流電機供應商常州市恒駿電機有限公司為您提供直流電機 ,歡迎新老客戶來電!
工業自動化中的直流伺服電機控制案例直流伺服電機憑借其高精度、高響應速度和可靠性,在工業自動化領域廣泛應用。以下結合具體案例,分析其控制策略與實現方式:工業機器人關節控制1.系統架構2.·硬件組成:采用西門子S7-1200PLC作為主控制器,通過通信模塊連接伺服驅動器,驅動器驅動直流伺服電機,并通過編碼器反饋實時位置信號至PLC的模擬量輸入端,· 控制邏輯:PLC通過博圖軟件編寫梯形圖程序,將速度給定值轉換為控制字傳輸至驅動器,實現電機正反轉、急停及慣性抑制。例如,通過程序可立即切換電機轉向,無需等待停止,提升機器人關節的動態響應,關鍵技術1.·環流可逆調速系統:通過正反組觸發器交替控制電流方向,結合環流調節器(ARR)限制環流(約額定電流的5%),確保平滑換向。
直流電機在實際應用中的設計考量
電樞繞組設計:繞組分布影響轉矩波動,需優化槽數與換向片數。換向器磨損:電刷與換向器的摩擦是主要損耗來源,需定期維護或采用無刷設計(BLDC)。定子磁場控制:他勵電機通過調節勵磁電流實現寬范圍調速,而永磁電機效率更高但調速受限。
定子提供磁場,轉子(電樞) 是能量轉換的**載體,換向器確保電流方向與磁場同步,三者協同實現直流電機的連續運轉。理解各部件的作用是分析電機性能(如效率、轉矩特性)和設計優化(如降低損耗、提升壽命)的基礎。
常州市恒駿電機有限公司致力于提供直流電機 ,歡迎您的來電!
醫療器械(如手術機器人)對直流電機的特殊需求在醫療器械領域,尤其是手術機器人等高精尖設備中,直流電機(包括無刷直流電機和直驅電機)的性能直接決定了設備的精細性、穩定性和可靠性。以下是醫療器械對直流電機的需求及其技術實現:一、高精度與高響應速度1.微米級定位精度手術機器人需完成血管縫合、神經修復等精細操作,要求電機的位置控制精度達到微米級,且重復定位誤差極小。例如,中研贏創的直驅電機通過伺服控制技術和精密傳感器,實現了毫米級甚至微米級的操作精度,滿足手術機器人對“指哪打哪”的需求。2.3.毫秒級動態響應在復雜手術中,機械臂需快速調整動作以應對突發情況。直驅電機的高速性能(如中研贏創的氣浮模塊)通過減少機械摩擦和振動,可在毫秒內完成動作響應,確保手術的流暢性和安全性。常州市恒駿電機有限公司為您提供直流電機 ,有想法的可以來電咨詢!無錫24V直流電機多少錢一臺
直流電機 ,就選常州市恒駿電機有限公司,讓您滿意,歡迎您的來電!連云港60V直流電機直銷
直流電機的基本工作原理與能量轉換機制
直流電機的基本工作原理: 直流電機(DC Motor)是一種將 電能轉換為機械能 的裝置,其**原理基于 電磁感應定律 和 洛倫茲力 的作用。以下是其工作原理的分步解析:
基本結構
定子(Stator):產生固定磁場的部分,可以是永磁體或電磁鐵(通過勵磁繞組通電產生磁場)。轉子(Rotor/電樞):由鐵芯和繞組(線圈)組成的旋轉部分,繞組通過換向器與外部電源連接。換向器(Commutator):由多個銅片組成,與電刷接觸,周期性改變電樞繞組中的電流方向。電刷(Brushes):固定于定子,將外部電流傳遞到旋轉的換向器。 連云港60V直流電機直銷