商機(jī)詳情 -
內(nèi)蒙古怎么樣工控機(jī)前景
暗物質(zhì)探測(cè)實(shí)驗(yàn)的極端靈敏度需求推動(dòng)工控機(jī)技術(shù)突破。中國(guó)錦屏地下實(shí)驗(yàn)室的PandaX-4T工控系統(tǒng)控制1.6噸液氙探測(cè)器,通過(guò)光電倍增管(PMT)陣列采集單光子信號(hào)(暗計(jì)數(shù)率<0.1Hz),結(jié)合波形甄別算法(上升時(shí)間<5ns)排除宇宙線本底。微力控制方面,LIGO的工控機(jī)通過(guò)靜電驅(qū)動(dòng)調(diào)節(jié)干涉儀反射鏡位置(精度0.1pm),維持引力波探測(cè)靈敏度(應(yīng)變分辨率1E-23)。超導(dǎo)傳感器是重要:工控機(jī)集成SQUID(超導(dǎo)量子干涉器件)陣列,磁場(chǎng)分辨率達(dá)1fT/√Hz,用于暗物質(zhì)粒子磁矩檢測(cè)。數(shù)據(jù)挑戰(zhàn)巨大:XENONnT實(shí)驗(yàn)的工控系統(tǒng)每日處理4PB原始數(shù)據(jù),采用FPGA實(shí)時(shí)觸發(fā)(閾值0.1keV)結(jié)合TensorFlow邊緣推理,事件篩選效率提升至99.7%。盡管應(yīng)用場(chǎng)景高度特殊,《物理評(píng)論D》指出,相關(guān)技術(shù)(如低噪聲電源、抗振設(shè)計(jì))將反哺工業(yè)工控機(jī),推動(dòng)其進(jìn)入zeptosecond(10^-21秒)精度時(shí)代。支持時(shí)間敏感網(wǎng)絡(luò)(TSN)協(xié)議。內(nèi)蒙古怎么樣工控機(jī)前景
工控機(jī)作為虛實(shí)融合的重要節(jié)點(diǎn),支撐元宇宙工廠的實(shí)時(shí)同步與決策。英偉達(dá)Omniverse工控接口(OVX)將物理設(shè)備映射為數(shù)字對(duì)象:每臺(tái)CNC機(jī)床的工控機(jī)通過(guò)USD(通用場(chǎng)景描述)協(xié)議上傳幾何、運(yùn)動(dòng)與狀態(tài)數(shù)據(jù)(延遲<2ms),在虛擬空間重構(gòu)全息產(chǎn)線。分布式計(jì)算方面,邊緣工控機(jī)集群通過(guò)Ray框架并行執(zhí)行3D渲染(每秒千萬(wàn)級(jí)面片),并同步調(diào)整真實(shí)設(shè)備參數(shù)(如機(jī)械臂位姿補(bǔ)償0.01mm)。在寶馬數(shù)字孿生工廠中,工控機(jī)運(yùn)行SWARM算法優(yōu)化AGV路徑:虛擬環(huán)境模擬10萬(wàn)次迭代后,真實(shí)物流效率提升33%。安全機(jī)制革新:工控機(jī)內(nèi)嵌區(qū)塊鏈輕節(jié)點(diǎn),驗(yàn)證數(shù)字指令的NFT簽名,防止虛擬模型篡改引發(fā)生產(chǎn)事故。據(jù)Gartner預(yù)測(cè),2028年60%的工業(yè)元宇宙將依賴工控機(jī)邊緣算力,實(shí)時(shí)數(shù)據(jù)吞吐量達(dá)1PB/日,推動(dòng)工業(yè)自動(dòng)化進(jìn)入“感知-仿真-決策”閉環(huán)新時(shí)代。安徽什么是工控機(jī)產(chǎn)品介紹支持OPC DA/UA雙協(xié)議棧。

6G的太赫茲頻段(0.1-10THz)為工控機(jī)帶來(lái)亞毫米級(jí)時(shí)延與Tbps級(jí)帶寬。日本NTT的IOWN工控原型機(jī)采用光子拓?fù)浣^緣體天線,在300GHz頻段實(shí)現(xiàn)100Gbps無(wú)線傳輸,時(shí)延低于0.1ms,使1公里內(nèi)的AGV集群控制同步誤差趨近于零。在半導(dǎo)體潔凈室中,工控機(jī)通過(guò)6G-RIC(無(wú)線智能控制器)動(dòng)態(tài)調(diào)整信道資源,為光刻機(jī)分配專(zhuān)屬頻段(QoS保障99.999%可用性)。硬件挑戰(zhàn)包括:工控機(jī)需集成氮化鎵(GaN)功率放大器,輸出功率達(dá)30dBm以克服太赫茲路徑損耗;散熱方案采用微流道液冷,熱阻降至0.05℃/W。定位精度突破:工控機(jī)通過(guò)到達(dá)角(AoA)與飛行時(shí)間(ToF)融合算法,在汽車(chē)焊裝車(chē)間實(shí)現(xiàn)±0.1mm的三維定位,替代傳統(tǒng)激光跟蹤系統(tǒng)。據(jù)Ericsson預(yù)測(cè),2030年工業(yè)6G連接數(shù)將超50億,工控機(jī)通過(guò)AI原生空口(AI-Native Air Interface)動(dòng)態(tài)優(yōu)化調(diào)制方式,頻譜效率提升至120bit/s/Hz,為數(shù)字孿生與全息交互提供底層支撐。
工控機(jī)的互聯(lián)能力取決于其對(duì)工業(yè)通信協(xié)議的兼容性,而協(xié)議選擇背后是行業(yè)生態(tài)的競(jìng)爭(zhēng)。傳統(tǒng)協(xié)議如Modbus(1979年由Modicon發(fā)布)因其簡(jiǎn)單性仍在大量使用:基于RS-485的Modbus RTU支持只多247個(gè)設(shè)備,每個(gè)數(shù)據(jù)幀只包含設(shè)備地址、功能碼和CRC校驗(yàn),適用于水處理廠的泵站控制。然而,現(xiàn)代智能制造對(duì)帶寬和實(shí)時(shí)性提出更高要求,EtherCAT(以太網(wǎng)控制自動(dòng)化技術(shù))憑借其“飛讀飛寫(xiě)”(On-the-fly processing)機(jī)制崛起:主站設(shè)備通過(guò)以太網(wǎng)幀依次訪問(wèn)每個(gè)從站,單個(gè)幀可完成數(shù)百個(gè)I/O點(diǎn)的讀寫(xiě),實(shí)現(xiàn)30μs級(jí)循環(huán)周期。例如,倍福(Beckhoff)的CX9020工控機(jī)作為EtherCAT主站,可控制512軸伺服系統(tǒng)同步運(yùn)動(dòng),被廣泛應(yīng)用于包裝機(jī)械。OPC UA協(xié)議則解決跨平臺(tái)互通問(wèn)題,其信息模型支持將PLC數(shù)據(jù)點(diǎn)、SQL數(shù)據(jù)庫(kù)字段甚至機(jī)器學(xué)習(xí)模型統(tǒng)一命名空間,并內(nèi)建TLS加密。三菱電機(jī)的MELIPC MI5000系列工控機(jī)通過(guò)OPC UA Pub/Sub模式,實(shí)現(xiàn)與云端MES系統(tǒng)的毫秒級(jí)數(shù)據(jù)同步。協(xié)議之爭(zhēng)也反映在地域市場(chǎng):Profinet在歐洲汽車(chē)行業(yè)占據(jù)主導(dǎo),而北美更多采用CIP。未來(lái)趨勢(shì)是TSN與5G URLLC的融合,華為發(fā)布的Atlas 500工控機(jī)已集成TSN交換芯片,可在智能工廠中實(shí)現(xiàn)跨VLAN的確定性和非確定性流量共存。配置RAID功能保障數(shù)據(jù)存儲(chǔ)安全。

引力波探測(cè)技術(shù)衍生出的皮米級(jí)位移傳感器,正被用于工控機(jī)的超精密制造場(chǎng)景。德國(guó)漢諾威工大研發(fā)的激光干涉引力波傳感器(靈敏度10^-22 m/√Hz),集成至ASML光刻機(jī)的工控系統(tǒng),實(shí)時(shí)監(jiān)測(cè)晶圓臺(tái)振動(dòng)(振幅<0.5pm),確保EUV曝光精度。主動(dòng)隔振方面,工控機(jī)通過(guò)六自由度磁懸浮平臺(tái)(帶寬0.1-100Hz)抵消地面振動(dòng),結(jié)合LQG算法將外界干擾抑制60dB。在量子計(jì)算機(jī)冷卻系統(tǒng)中,工控機(jī)利用超導(dǎo)重力梯度儀(分辨率1E-12 g)檢測(cè)氦氣流的微重力擾動(dòng),調(diào)整脈沖管制冷機(jī)功率(精度±0.1μW),維持量子比特相干時(shí)間超過(guò)500μs。商業(yè)轉(zhuǎn)化中,AOSense的工控模組通過(guò)原子干涉儀測(cè)量機(jī)床主軸熱變形(±3nm精度),補(bǔ)償加工誤差,使航空發(fā)動(dòng)機(jī)葉片面形精度提升至0.05μm。Global Market Insights預(yù)測(cè),2030年超精密工控傳感市場(chǎng)將突破34億美元,半導(dǎo)體與光學(xué)制造占據(jù)重要份額。采用抗干擾設(shè)計(jì),適應(yīng)惡劣工業(yè)環(huán)境運(yùn)行。內(nèi)蒙古工程工控機(jī)
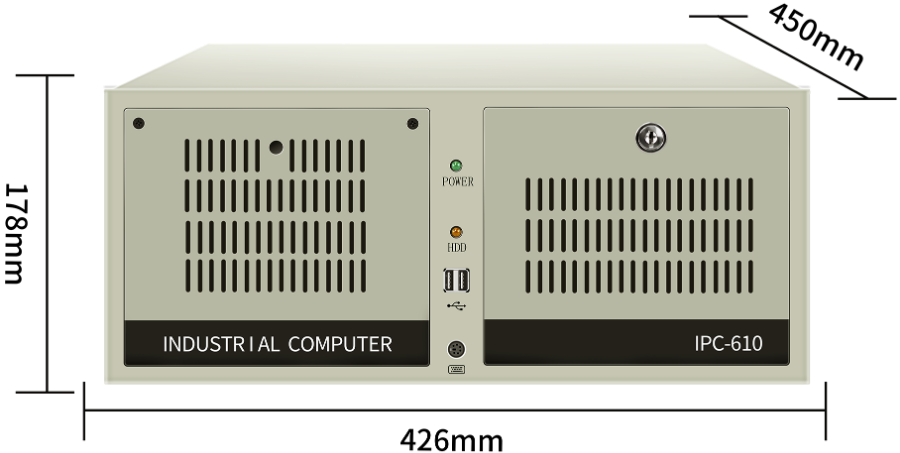
配置PCI/PCIe擴(kuò)展槽位。內(nèi)蒙古怎么樣工控機(jī)前景
在工業(yè)自動(dòng)化領(lǐng)域,實(shí)時(shí)操作系統(tǒng)是工控機(jī)區(qū)別于通用計(jì)算平臺(tái)的重要技術(shù)壁壘。RTOS的關(guān)鍵指標(biāo)是確定性響應(yīng)——無(wú)論系統(tǒng)負(fù)載如何,任務(wù)必須在嚴(yán)格時(shí)限內(nèi)完成。例如,在半導(dǎo)體封裝設(shè)備中,工控機(jī)需在2毫秒內(nèi)完成視覺(jué)定位計(jì)算并觸發(fā)貼片頭動(dòng)作,任何延遲都會(huì)導(dǎo)致芯片錯(cuò)位。主流RTOS如VxWorks和QNX采用微內(nèi)核架構(gòu),將任務(wù)調(diào)度、中斷處理等重要功能與驅(qū)動(dòng)程序隔離,確保關(guān)鍵進(jìn)程不被阻塞。以風(fēng)河公司的VxWorks為例,其優(yōu)先級(jí)搶占式調(diào)度器支持256個(gè)任務(wù)等級(jí),中斷延遲低于500納秒,適用于數(shù)控機(jī)床的伺服控制。開(kāi)源領(lǐng)域,Linux通過(guò)PREEMPT_RT補(bǔ)丁也可實(shí)現(xiàn)軟實(shí)時(shí)性能,如西門(mén)子的SIMATIC IPC477D工控機(jī)基于此方案達(dá)到100微秒級(jí)抖動(dòng)控制,成本較商業(yè)RTOS降低40%。實(shí)時(shí)性不僅依賴操作系統(tǒng),還需硬件協(xié)同:英特爾® Time Coordinated Computing技術(shù)允許CPU時(shí)鐘同步到1微秒精度,EtherCAT主站控制器通過(guò)ASIC芯片實(shí)現(xiàn)分布式時(shí)鐘機(jī)制,將數(shù)百個(gè)節(jié)點(diǎn)的同步誤差控制在±100納秒內(nèi)。在智能電網(wǎng)保護(hù)系統(tǒng)中,這類(lèi)技術(shù)使得工控機(jī)能在5毫秒內(nèi)檢測(cè)到短路故障并觸發(fā)斷路器,避免電網(wǎng)崩潰。RTOS的演進(jìn)方向是融合AI與實(shí)時(shí)性。內(nèi)蒙古怎么樣工控機(jī)前景