商機詳情 -
北京電池片陣列排布定制機器視覺檢測服務
瑕疵檢測系統具備高度的靈活性,能夠根據產品的特點和要求進行定制化開發。不同的產品在形狀、尺寸、材質、表面特性以及質量標準等方面存在著巨大差異。以形狀為例,有的產品是規則的幾何形狀,如方形的電路板、圓形的軸承,而有的則是復雜的異形結構,如汽車發動機的渦輪葉片。針對這些不同形狀的產品,瑕疵檢測系統可以定制相應的圖像采集方案,確保能夠準確地獲取產品表面圖像。在材質方面,金屬、塑料、陶瓷等材質的反射率、光澤度不同,系統可調整照明設備和圖像處理參數來適應。對于質量標準,一些電子產品可能對表面瑕疵的容忍度極低,要求檢測精度達到微米級別,而普通日用品則相對寬松。瑕疵檢測系統能夠依據這些不同的要求,定制合適的瑕疵判斷標準和算法模型,從而精準地檢測出符合特定產品需求的瑕疵,為企業提供個性化的質量檢測解決方案。定制機器視覺檢測服務可以應用于產品質量檢測、安全監控、智能交通等領域。北京電池片陣列排布定制機器視覺檢測服務
瑕疵檢測系統對于企業提高產品的競爭力有著極為關鍵的意義。在當今全球化的市場競爭環境下,產品質量是企業立足市場的根本。瑕疵檢測系統能夠確保企業產品的高質量,使其在眾多競爭對手中脫穎而出。高質量的產品能夠吸引更多的消費者購買,增加產品的市場份額。例如,在智能手機市場,消費者更傾向于購買外觀無瑕疵、性能穩定的產品,經過瑕疵檢測系統嚴格檢測的手機在市場上更具競爭力。而且,產品質量的提升有助于企業打造品牌形象,品牌**度和美譽度的提高進一步增強了產品的競爭力。此外,企業通過使用瑕疵檢測系統提高了生產效率、降低了成本,從而可以在價格上更具優勢,或者有更多資金投入到產品研發和市場推廣中,從多個方面提升產品在市場中的競爭力,使企業在激烈的市場競爭中立于不敗之地。壓裝機定制機器視覺檢測服務定制價格定制機器視覺檢測服務可以應用于娛樂領域,幫助游戲開發商進行虛擬現實和增強現實技術開發。
機器視覺檢測采用條碼質量追溯系統后,工作更簡單、方便、準確和快捷。通過數據的采集、管理、檢索、存檔和統計實時化,質量信息動態地反映生產現狀使生產管理者能及時、準確、詳細地了解生產情況。產品的自我辨別也是企業保護自己的一種方式,可以防止假冒產品損壞企業聲譽。南京熙岳智能追蹤系統提高了企業的質量及管理水平,將為企業的決策、管理帶來顯赫的效益。手工操作已越來越不適應新形勢下的現代化管理的要求,計算機技術和條碼技術引入生產產品追溯系統領域,已成為必然趨勢。例如原來生產質量只能進行現場產品追溯系統,如果產成品出庫以后則無法繼續追溯其產品的質量情況,各工序生產者,質檢責任人等。而現代化的管理要求企業能夠為客戶提供更多的信息和個性化的服務。
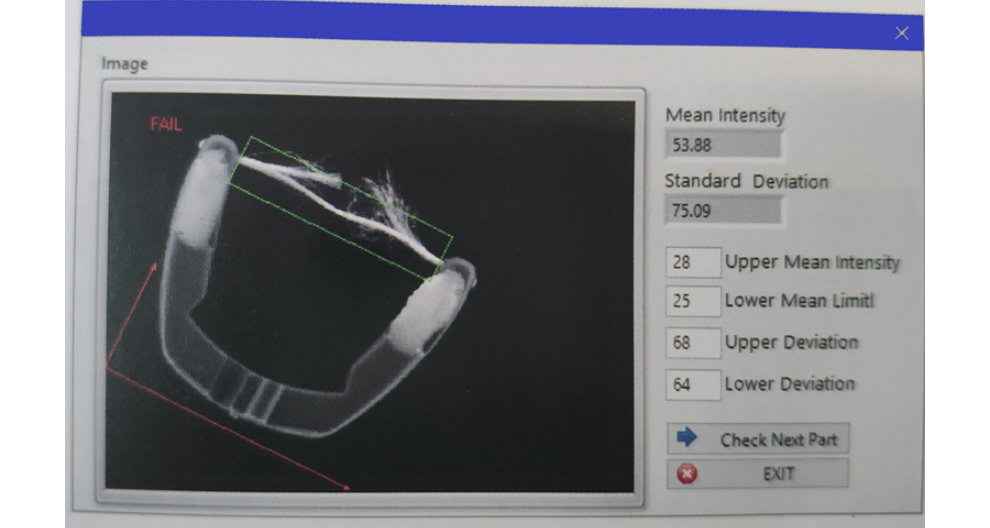
瑕疵檢測系統運用紅外技術實現對產品表面的無損檢測。紅外技術基于物體的紅外輻射特性來工作。在檢測時,產品表面會自然發射出不同強度的紅外輻射,而存在瑕疵的區域由于其物理性質如材質結構、內部應力、表面粗糙度等與正常區域有所差異,其紅外輻射強度和分布也會相應改變。例如在檢測復合材料制成的航空航天部件時,內部的分層、脫膠等瑕疵會導致表面溫度分布不均勻,通過紅外熱像儀可以清晰地捕捉到這種溫度差異形成的圖像,從而確定瑕疵的位置和范圍。這種無損檢測方式不會對產品造成任何物理破壞,既保證了產品的完整性,又能準確地檢測出表面瑕疵,尤其適用于對那些高價值、對精度和質量要求極高且不容許有任何損傷的產品進行檢測,如文物修復品、電子產品等。通過定制機器視覺檢測服務,醫生可以更準確地識別和分析醫學圖像。
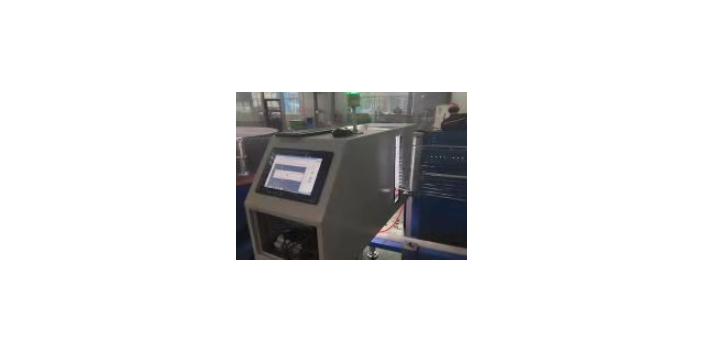
目前機器視覺檢測應用非常普遍,多用于替代人工檢測,在一些危險的工作環境中也常被替代人工作業,比較繁復的工作也會使用機器視覺來進行檢測。在傳統的自動化生產中,金屬表面尺寸典型的方法是利用卡尺或千分尺在被測工件上針對某個參數進行多次測量后取平均值。這些檢測設備或檢測手段測量精度低、測量速度慢、測量數據無法及時處理,因此無法滿足大規模自動化生產的需要。南京熙岳智能科技給大家介紹一下金屬表面尺寸檢測的應用實例。一、圖像的獲取用于金屬邊緣尺寸的檢測,系統采用高分辨率工業相機,可以快速獲取產品圖像,通過圖像識別、分析和計算,給出產品邊緣尺寸,并輸出相應檢測合格/不合格信號提示,以便于設備對缺陷品的處理。二、定位系統設計基于機器視覺圖像處理技術研發的金屬尺寸測量自動定位系統,具有高精度、高速、多樣品化的特點。系統主要模塊有:觸發模塊、引導模塊。根據用戶需求,由于需要檢測產品的長度、寬度和厚度。而在一個工位下無法完成三個尺寸的檢測,所以需要雙工位檢測才能完成檢測需求,將樣品移動到檢測位,觸發相機并及時對視覺系統輸出檢測信號,從而完成檢測功能。通過定制機器視覺檢測服務,企業可以提高生產效率,降低成本,并提供更好的產品質量控制。北京電池片陣列排布定制機器視覺檢測服務
通過定制機器視覺檢測服務,企業可以更好地了解消費者需求和市場趨勢。北京電池片陣列排布定制機器視覺檢測服務
工業機器視覺系統的工作過程主要如下:1.當傳感器檢測到被檢測物體靠近攝像機的拍攝中心時,向圖像采集卡發送觸發脈沖;2.圖像采集卡根據設定的程序和延時向照明系統和攝像頭發送啟動脈沖。3.向相機發送啟動脈沖,相機結束當前拍攝并開始新的拍攝,或者相機在啟動脈沖到來之前處于等待狀態,在檢測到啟動脈沖后啟動,并在開始新的拍攝之前打開曝光部件(曝光時間是預先設定的);另一個啟動脈沖發送給光源,光源的開啟時間需要與相機的曝光時間相匹配;相機掃描并輸出圖像;4.圖像采集卡接收信號并通過A/D轉換將模擬信號數字化,或者直接接收攝像頭數字化的數字視頻數據;5.圖像采集卡將數字圖像存儲在計算機的存儲器中;6.計算機對圖像進行處理、分析和識別,得到檢測結果;7.處理結果控制裝配線的動作,定位裝配線,校正運動誤差等。北京電池片陣列排布定制機器視覺檢測服務