商機詳情 -
鞍山全自動汽車面漆檢測設備供應商
據公開消息顯示,蔚來已組建300人的芯片團隊,同時研發自動駕駛芯片和激光雷達芯片,**激光雷達主控芯片“楊戩”10月量產;小鵬芯片團隊正在開發對標特斯拉FSD大算力自動駕駛芯片;理想也在去年擴招了芯片團隊,與三安半導體合作建立蘇州功率半導體產線。
而傳統自主品牌車企則更多從車載使用量較大、開發難度稍低的功率半導體入手。一些車企也在自研芯片方面與芯片企業進行合作,如地平線與比亞迪、長城、理想、長安等主流車企達成量產定點合作。 流水線安裝、占地面積小、安裝靈活的汽車面漆檢測設備。鞍山全自動汽車面漆檢測設備供應商
汽車面漆檢測設備
汽車面漆檢測設備是用于汽車整車制造工廠的后道檢測工序,主要用于檢測汽車表面油漆的劃痕、空洞、瑕疵、凸點等缺陷的檢測,是汽車生產工序后質量的保障型設備。5.敷膜技術是預制一種適應于熱成形的面漆涂膜,其經熱成形后的產品的面漆性能和外觀與傳統的烘烤噴涂涂膜非常相近。該技術主要應用于塑料件生產,采用夾物模壓或內模工藝將預制好的復合涂膜在塑料件澆注成形的同時完成成形并與塑料件熔為一體,得到無缺陷的涂裝覆蓋件。車身骨架采用傳統沖壓焊裝工藝制造,涂裝車間只對車身骨架進行涂裝,面漆采用粉末噴涂技術。由于車身骨架外露面積較小,所以面漆顏色不必與覆蓋件相同,深淺各1種即可。大面積的覆蓋件都是采用敷膜技術制造的塑料件,顏色有上千種。這樣簡化了車身涂裝工藝,在降低涂裝成本的同時,使涂裝的VOC排放達到7g/m2左右,遠低于歐洲排放法規的要求鞍山全自動汽車面漆檢測設備供應商汽車面漆檢測設備采用智能化操作界面,方便用戶快速上手。
基于計算機視覺的表面缺陷自動檢測作為一種快速發展的新型檢測技術,具有速度快、效率高等優點,已經成功應用到多個行業。將其應用到汽車車身漆膜缺陷檢測領域,可改變現在人工檢測耗時過長、一次檢出率低等缺陷,同時可以降低人工成本。主要介紹了漆膜缺陷自動檢測技術的原理、特點,以及在一些生產線中的應用實例,總結了現狀及存在的問題,并對其應用前景做了展望。汽車涂裝是汽車生產過程中重要的一個環節,主要為汽車提供外觀裝飾性和長期的防腐蝕性能。常規的汽車涂裝過程中,噴涂后的車身需要進行漆膜表面的缺陷檢測和修飾。目前,噴涂后車身漆膜檢測主要通過人工目視的方法完成,存在耗時過長、效率低下及受人為因素影響等缺點,是制約涂裝車身質量的關鍵因素之一。隨著光電、自動化和計算機圖像處理技術的發展,計算機視覺在不同工業部門得到了大量的應用。比如基于計算機視覺的表面缺陷自動檢測技術已經大量地應用在織物表面、食品表面、鋼表面、瓷磚表面以及多晶硅太陽能電池表面檢測等領域。近幾年,表面缺陷自動檢測技術開始在汽車車身漆膜缺陷的檢測領域發展,并且已經開始在一些汽車公司測試與應用。與傳統的人工檢測方法相比。
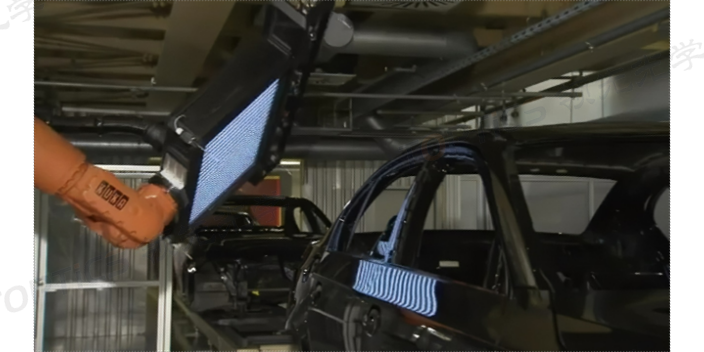
包括四套檢測機械手臂、四套漆面視覺檢測模組;檢測時,被檢測汽車移動至檢測區域后,四套檢測機械手臂分別帶動固定在檢測機械手臂前端的四套漆面視覺檢測模組依據汽車表面輪廓定位檢測劃分規劃得到的采樣點,進行汽車表面的全范圍成像,成像后通過汽車漆面圖像處理提取汽車漆面表面外觀缺陷。所述的漆面視覺檢測模組包括:n套成像鏡頭相機組、防護外殼、大尺寸條紋投影屏、三個測距傳感器、均勻漫射發光板;n套成像鏡頭相機組、大尺寸條紋投影屏、三個測距傳感器、均勻漫射發光板均剛性固定在防護外殼上;且n套成像鏡頭相機組、大尺寸條紋投影屏、三個測距傳感器、均勻漫射發光板自上而下安裝,多套成像鏡頭相機組、三個測距傳感器自左而右均勻分布,大尺寸條紋投影屏設置在多套成像鏡頭相機組和三個測距傳感器之間,均勻漫射發光板設置在三個測距傳感器下端。所述的n取值為3時為比較好,三套成像鏡頭相機組、三個測距傳感器自左而右均勻分布,且每套成像鏡頭相機組與每個測距傳感器上下位置對稱。所述的汽車表面輪廓定位檢測劃分規劃:通過讀取汽車3d模型,將模型分割為多個離散點,再依據n套成像鏡頭相機組的物方成像視場大小進行離散點的剔除、篩選。高級車型外觀檢測:品質高、要求高的汽車面漆檢測設備。

汽車測試裝置一般是由若干相互聯系或相互作用的傳感器和一般設備等元件,就是為實現一定測試目的而組成的有機整體。測試系統有的體積龐大,有的體積簡易,復雜的測試系統,一般是由一些基本的測試小系統組合而成的。
目前隨著現代科技的迅速發展,非電物理量的測試和控制技術,已經應用于汽車檢測中。一般的非電量的電測系統是常用的檢測系統。一個完整的檢測系統,一般應包括:傳感器、信號調節器、顯示和記錄器以及數據處理器。另外還有一些定度和校準等系統附加的設備。
在汽車檢測實驗中,經常會碰到如何選擇檢測儀器及組成檢測系統的問題。對檢測系統的要求,當然要從檢測對象、檢測目的和要求出發,使其達到技術上的合理,經濟上的節約。應當綜合考慮精度要求。使用環境及被測物理量變化的快慢、檢測范圍、成本費用及自動化程度因素。但基本的要求應該是具有單值的、確定輸入和輸出關系。使檢測結果在精度要求范圍內不失真地反映被測物理量,檢測系統的輸出才能作為其輸入的量度,從而完成預定的檢測任務
這款檢測設備能夠快速識別汽車面漆的微小瑕疵,確保完美涂裝。鞍山全自動汽車面漆檢測設備供應商
專業的面漆檢測設備,讓汽車涂裝行業煥發新活力。鞍山全自動汽車面漆檢測設備供應商
深度學習算法主要是數據驅動進行特征提取和分類決策,根據大量樣本的學習能夠得到深層的、數據集特定的特征表示,其對數據集的表達更高效和淮確、所提取的抽象特征魯棒性更強,泛化能力更好,但檢測結果受樣本集的影響較大。深度學習通過大量的缺陷照片數據樣本訓練而得到缺陷判別的模型參數,建立出一套缺陷判別模型,終目標是讓機器能夠像人一樣具有分析學習能力能夠識別缺陷。深度學習算法基于TensorFlow和Keras框架,常用的深度學習算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力網絡)和CNN(卷積神經網絡)為算法框架,其中RPN用于生成可能存在目標的候選區域(Proposal),CNN用于對候選區域內的目標進行識別并分類,同時進行邊界回歸調整候選區域邊框的大小和位置使其更精淮地標識缺陷目標。FasterR-CNN相比前代的R-CNN和FastR-CNN比較大的改進是將卷積結果共享給RPV和FastR-CNN網絡,在提高準確率的同時提高了檢測速度。總體來講,傳統圖像算法是人工認知驅動的方法,深度學習算法是數據驅動的方法。深度學習算法一直在不斷拓展其成用的場景.但傳統圖像方法因其成熟、穩定等特征仍具有應用價值。目前。鞍山全自動汽車面漆檢測設備供應商