商機詳情 -
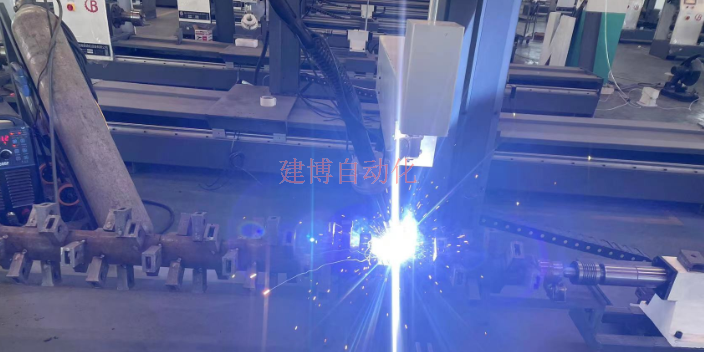
還田機軸焊接加工
一種旋耕機刀軸用點焊設備的刀片輸送裝置,包括設于機架上的供料臺,沿所述供料臺鋪設有用于運送刀片的供料履帶,在供料臺上設有驅動所述供料履帶運動的動力機構,沿供料履帶的長度方向設置有用于放置刀片的刀座,所述供料臺上設置有當刀座運動到焊接位置時將刀座頂起的送料架,所述供料臺上設有驅動所述送料架升降的氣缸.操作方便,提高焊接效率,能夠降低工人勞動強度,提高了焊接質量,使得焊接更加精細,較之以前的人工作業,不但作業精度人工無法達到,速度也有很大的提高.四軸焊接技術適用于焊接簡單的工件,如平面、直線和圓弧等。還田機軸焊接加工
軸焊接
工業機器人的軸,可以用專業的名詞“自由度”來解釋。合理推測就是,當機器人的軸數增加,機器人就有更高的靈活性。四軸SCARA機器人(以下簡稱四軸機器人)和六軸關節式機器人(以下簡稱六軸機器人),其中四軸機器人是特別為高速取放作業而設計的,而六軸機器人則提供了更高的生產運動靈活性。軸與卡迪爾坐標系息息相關。三軸機器人也被稱為直角坐標或者笛卡爾機器人,它的三個軸可以允許機器人沿三個軸的方向進行運動;而六軸機器人中的六軸,就是笛卡爾坐標系中的XYZ軸,及繞XYZ軸旋轉的UVW軸。還田機軸焊接加工六軸焊接機器人的關節更多。
三軸可以撿起一個物體,抬起它,它的水平和垂直移動,并將其設置或呈現觸手可及的機器人在X,Y,Z空間的任何地方在不改變對象的方向。四軸可以拿起一個對象,將其提起,水平移動,并將其設置或呈現在X,Y,Z空間改變對象的方向沿一軸(例如偏航)。五軸可以拿起一個對象,將其提起,水平移動,并將其設置在X,Y,Z空間改變對象的方向沿兩個軸(偏航和變槳)。六軸可以拿起一個對象,將其提起,水平移動,并將其設置在X,Y,Z空間改變對象的方向沿三個軸(偏航,俯仰和橫滾)。七軸所有的六軸機器人的運動能力,隨著能力的線性方向(通常為水平運動,從一個地方到另一個移動機器人沿著軌道)。
自動化焊接設備的構成: 焊接電源,其輸出功率和焊接特性應與擬用的焊接工藝方法相匹配,并裝有與主控制器相連接的接口……送絲機及其控制與調速系統,對于送絲速度控制精度要求較高送絲機,其控制電路應加測速反饋。焊接機頭用其移動機構,其由焊接機頭,焊接機頭支承架,懸掛式拖板等組成,對于精密型焊頭機構,其驅動系統應采用裝有編碼器的伺服電動。焊件移動或變位機構,如焊接滾輪架,頭尾架翻轉機,回轉平臺和變位機等,精密型的移動變位機構應配伺服電動機驅……焊件夾緊機構。主控制器,亦稱系統控制器,主要用于各組成部分的聯動控制,焊接程序的控制,主要焊接參數的設定,調整和顯示。必要時可擴展故障診斷和人機對話等控制功能。計算機軟件,焊接設備中常用的計算機軟件有:編程軟件,功能軟件,工藝方法軟件和系統。焊頭導向或跟蹤機構,弧壓自動控制器,焊槍橫擺器和監控系統9、輔助裝置,如送絲系統,循環水冷系統、焊劑回收輸送裝置、焊絲支架、電纜軟管及拖鏈機構結構設計電氣控制設計三大部分。刀軸焊接機器人采用先進的機器人技術和焊接技術。

焊接機器人要完成焊接作業,必須依賴于控制系統與輔助設備的支持和配合。完整的焊接機器人系統般由機器人操作手、變位機、控制器、控制系統、焊接傳感器、控制計算機和相應的安設備等組成。焊接機器人是通過示教編程完成焊接工作,示教編程是逐步完成的,操作人員在示教器中設置焊縫軌跡的關鍵點以及焊接參數,焊接參數主要包括焊接電流、焊接電壓、焊接速度、送絲速度、焊槍位姿、擺動幅度等,工業焊接機器人可以記憶操作人員的操作,并自動生成連續執行操作的程序。還田機軸焊接有用嗎?請您致電連云港建博自動化設備有限公司。還田機軸焊接加工
還田機軸焊接定制?請您致電連云港建博自動化設備有限公司。還田機軸焊接加工
根據秸稈還田機刀片的磨損原因,刀片堆焊材料應同時具備高硬度、高抗裂性和高耐磨性等綜合性能。在選擇焊接材料時,需要注意以下幾點。耐磨性秸稈還田機刀片在工作時,經常與莖稈、泥土、其它田問雜質接觸摩擦,在粉碎過程中會消耗刀具的基體材料,因此,要求焊接材料具有較強的耐磨性。建議焊接材料基體中加入WC碳化鎢粒子,可提高堆焊層的耐磨性。韌性韌性,表示刀片堆焊后在塑性變形和斷裂過程中吸收能量的能力。韌性越好,則發生脆性斷裂的可能性越小。為防止秸稈還田機刀片出現斷裂的現象,建議選用焊接材料含有鈮和鎳等元素,可提高刀片的強度和韌性,堆焊后無裂紋。硬度焊接材料硬度的大小,表示其耐磨性能的高低。硬度值越大,耐磨性能越強,堆焊后刀片的耐磨性能越好。還田機軸焊接加工