商機詳情 -
合肥快速汽車面漆檢測設備源頭廠家
所述花鍵孔25內可滑動的設置有末端伸入所述鎖定槽21內的花鍵桿23,所述花鍵桿23與所述花鍵孔25端壁間設置有復位彈簧26,當向下按壓所述機身10時,所述花鍵桿23自上而下依次卡入所述鎖定槽21內,從而調整機身10與所述汽車表面距離,所述機身10上方設置有可轉動的手動輪27,將所述手動輪27轉動半周通過所述機身10頂壁內設置的聯動裝置98可以帶動所述花鍵桿23轉動半周,此時所述機身10再所述頂壓彈簧12作用下上移。有益地,所述傳動裝置99包括所述傳動腔42頂壁內設置的齒輪腔50,所述齒輪腔50與所述傳動腔42之間轉動設置有第二轉軸36,所述第二轉軸36頂部末端轉動設置于所述轉動腔14頂壁內,所述第二轉軸36內設置有上下貫通的貫通孔35,所述傳動腔42內的所述第二轉軸36底部末端固定設置有與所述螺紋套41外表面固定設置的diyi錐齒輪43嚙合的第二錐齒輪38,所述齒輪腔50內的所述第二轉軸36外表面固定設置有diyi齒輪37,所述齒輪腔50內可轉動的設置有與所述齒輪腔50底壁內固定設置的第二電機48動力連接的第三轉軸51,所述齒輪腔50內的所述第三轉軸51外表面固定設置有與所述diyi齒輪37嚙合的第二齒輪49,所述第三轉軸51頂部末端伸入所述轉動腔14頂壁內開口向下設置的凹槽54內。我們的設備采用無接觸、高精度的檢測方案,可離線或在線自動化檢測。合肥快速汽車面漆檢測設備源頭廠家
汽車面漆檢測設備
圖像處理單元通過使用一系列算法對圖片進行處理,獲得缺陷3D或2D特征,通過與數據庫比對之后,獲得缺陷位置、分類、尺寸等信息,然后將數據進行輸出。漆膜缺陷自動檢測系統構成汽車車身長度一般在~m,寬度在~m,而且車身曲面多,結構比較復雜。為了能將車身外表所有區域都覆蓋到,需要增加光源和相機數量或者將光源和相機安裝在機器人等可移動設備上,目前研究和應用較多的主要有以下2種結構:1)將光源和CCD相機安裝到包圍車身的鋼結構框架上,通過增加光源和CCD相機數量的方式覆蓋整個車身。這種結構的優點是結構簡單,調試時只需要調整相機角度,耗時短。缺點是柔性低,不同的車型外形有較大差異時不能通用。2)將光源和CCD相機集成到布置在車身兩側的機器人手臂上,使用2臺以上的機器人,可以增加行走軌道擴大檢測區域。此結構優點是機器人相對靈活,對車身外表任何區域都可以進行拍攝,柔性高,不同車型可混線檢測。缺點就是系統結構復雜,檢測一臺車的時間相對第一種結構要長。能在40~60JPH的涂裝生產線上,用來檢測直徑mm的缺陷。4臺機器人并聯使用,每臺機器人都安裝了1個大尺寸的顯示器和4臺200萬像素的相機,每臺相機在一個檢測位置會拍攝8張圖像。合肥快速汽車面漆檢測設備源頭廠家利用計算機視覺技術和深度學習方法,實現了車身漆面缺陷的自動檢測。
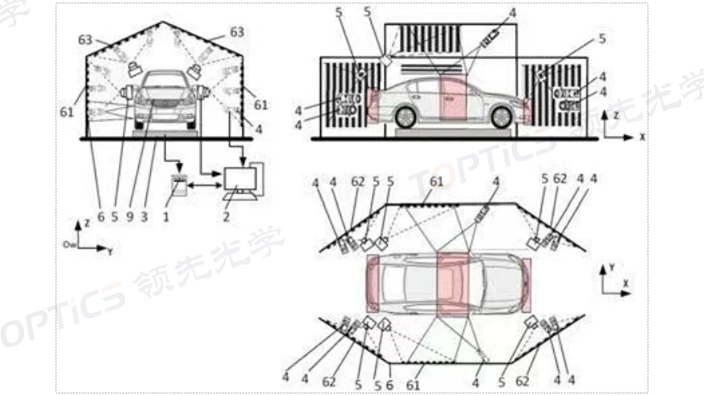
剔除、篩選原則依據兩點間距進行,若兩點間距小于等于物方視場的一半大小時,則保留為同一幅視場覆蓋范圍點;若兩點間距超出物方視場的一半大小時,則保留為不同幅視場覆蓋范圍點;通過上述原則得到系列采樣點,從而完成對汽車表面輪廓定位檢測劃分規劃。檢測時,檢測機械手臂帶動漆面視覺檢測模組至被檢測汽車表面的采樣點,漆面視覺檢測模組中的三個測距傳感器分別測量當前漆面視覺檢測模組與被檢測汽車表面的距離值,通過三個測距傳感器獲得的三組距離值,根據三組距離值調整檢測機械手臂以保證三套成像鏡頭相機組成像清晰;調整完成后,大尺寸條紋投影屏投影條紋至被檢汽車表面,通過n套成像鏡頭相機組拍攝條紋圖像;大尺寸條紋投影屏投影出的條紋包括橫、豎90°正交的兩組條紋組,其中橫條紋組包含不同間距的多條橫條紋,豎條紋組包含不同間距的多條豎條紋;n套成像鏡頭相機組(可拍攝采集到橫條紋圖像組與豎條紋圖像組;條紋圖像采集完成后,關閉大尺寸條紋投影屏,打開均勻漫射發光板,利用n套成像鏡頭相機組拍攝被檢測汽車表面圖像,得到漫射均勻圖像;再通過汽車漆面圖像處理提取出被檢測汽車表面的外觀缺陷。汽車漆面圖像處理具體包括以下步驟:步驟。
在檢測時計算機系統需要處理大量圖像,因此需要更優的計算機處理器。在車身檢測過程中,則分為五部分展開,分別為車身前蓋、車頂、左邊、右邊和后蓋,其中各自安裝一臺計算機處理器,通過通訊主機實現交互通信,進而得出總體檢測結果。檢測系統的視覺傳感器則分別固定在車身的周邊位置,通過設置一定的掃描重疊區,保證檢測區域能夠完全覆蓋車輛表面。2自動檢測技術在汽車涂裝質量檢測中的應用流程車輛在達到檢測站之前,車身信息讀寫站會將目標車輛的相關數據進行統計并發送給檢測系統,主要信息包括車身的基本型號、車身表面的噴漆顏色、車頂的特殊形式、是否存在天線孔等。檢測系統在收到型號信息后,可以根據對應型號加載數據參數。當車輛行進觸發光電開關傳感器后,檢測系統正式開始工作,由編碼器發出的脈沖信號進行圖像采集工作,直到完成檢測任務。圖像采集圖像采集是自動檢測的首要個環節,每一個傳感器通過掃描車身的特定區域,采集800-1000張高清晰度圖像,根據車輛表面的面積大小,所采集的圖像個數有一定浮動空間,但其圖像會完整覆蓋車身表面,保證檢測目標不出現任何遺漏。在車身通過檢測系統時,視覺傳感器會一直根據編碼器生成的信號記錄對應圖像。這樣能大幅提升可靠性,盡可能減少偽缺陷或誤報缺陷的數量。

汽車漆面缺陷主要有顆粒流排劃痕等,漆面缺陷檢測系統是利用機器模擬人眼的視覺功能,輔助完成漆面缺陷的檢測和判斷工作。漆面缺陷檢測系統通常由前端采集傳輸和后端處理顯示2部分組成。前端采集傳輸主要是通過工業相機完成整車漆面圖像的采集和傳輸,后端處理顯示主要是針對漆面缺陷圖像進行數據處理、分析分類和終端顯示。系統硬件主要包括光源、工業相機、視覺處理器以及機器人等,系統軟件主要包括視覺分析系統和運動控制系統等。系統對漆面缺陷檢測的過程和結果全程保存在本地電腦數據庫上,同時可以與車間管理系統對接,實現檢測結果的分類查詢、匯總分析等功能。主流的漆面檢測技術路線分為2類,一類是隧道式缺陷檢測系統,另一類是機器人式缺陷檢測系統。隧道式和機器人式缺陷檢測系統的共同點在于均為鏡面反射成像原理,支持顆粒流掛劃痕等漆面缺陷的檢測,但受制于光學成像的局限性,車身遮擋區域及外板邊緣10mm無法檢測。 漆面好壞同樣決定著產品質量及品牌形象,因此針對漆面質量檢測也是整車出廠前的重要檢驗項。合肥快速汽車面漆檢測設備源頭廠家
我們也將致力于對車身檢測結果的優化、質量缺陷數據的分析與應用,持續努力提高涂裝車間漆面質量。合肥快速汽車面漆檢測設備源頭廠家
機器視覺近年來大受歡迎,尤其是在制造業。公司可以從該技術增強的靈活性、減少產品故障和提高整體生產質量中獲益。機器獲取圖像、評估圖像、解釋情況然后做出適當響應的能力稱為機器視覺。智能相機、圖像處理和軟件都是系統的一部分。由于成像技術、智能傳感器、嵌入式視覺、機器和監督學習、機器人接口、信息傳輸協議和圖像處理能力方面的重大進步,視覺技術可以在許多層面上為制造業提供幫助。通過減少人為錯誤并確保對通過生產線的所有貨物進行質量檢查,視覺系統提高了產品質量。根據數據研究報告,到2028年底,工業機器視覺市場價值,預計將以。此外,具有更高產品質量措施的制造單位或工廠的檢驗需求增加,可能會推動人工智能技術下對工業機器視覺的需求并推動市場向前發展。 合肥快速汽車面漆檢測設備源頭廠家
領先光學技術(江蘇)有限公司成立于2019年,公司總部地址位于武進區天安數碼城內獨棟12-2#寫字樓。我們的種子企業“ling先光學技術(常熟)有限公司”成立于2014年,是國家高新技術企業、科技型中小型企業、江蘇省民營科技企業、雛鷹企業。知識產權80余項(發明專利8項)。內核團隊:教授2名、博士2名、行業渠道關鍵人4人。長期穩定與復旦大學、大連理工大學合作。底層技術包括:光學(相位偏折、白光干涉、白光共焦、深度學習);MicroLED(發光器件、透明顯示、微型投影)。是做一件“利用光學進行工業質量檢測設備的生產和制造”。自主開發光學系統和底層內核算法,擁有十年以上行業經驗,主要應用于:汽車玻璃檢測行業、片材檢測行業、半導體材料檢測行業,我們的戰略新產品:微米級光刻機已經完成版流片,也正在一步步趨于穩定和成熟。公司在科技的浪潮中,已經具有將內核技術轉化為產品的經驗與能力。公司是高科技、高成長性企業,公司不斷的夯實自身技術基礎,愿成為中國工業發展中奠基石的一份子,打破國外的智能裝備的,樹名族自有高技術品牌。