-

 淮安重載AGV商家
發(fā)布時間:2024.08.16
淮安重載AGV商家
發(fā)布時間:2024.08.16
磁條導(dǎo)航是一項非常成熟的技術(shù),主要是通過在路面上鋪設(shè)磁條,通過磁導(dǎo)航傳感器不間斷地感應(yīng)磁條產(chǎn)生的磁信號實現(xiàn)導(dǎo)航,通過讀取預(yù)先埋設(shè)的RFID卡來完成指定任務(wù)。磁條導(dǎo)航現(xiàn)場施工簡單,成本低,對于聲光無干擾...
-
 金華智能AGV商家
發(fā)布時間:2024.08.15
金華智能AGV商家
發(fā)布時間:2024.08.15
為了實現(xiàn)AGV自主導(dǎo)航,需要根據(jù)多種傳感器識別多種環(huán)境信息:如道路邊界、地形特征、障礙、引導(dǎo)者等。AGV通過環(huán)境感知確定前進方向中的可達區(qū)域和不可達區(qū)域,確定在環(huán)境中的相對位置,以及對動態(tài)障礙物運動進...
-
 蕪湖CE認(rèn)證AGV供應(yīng)商
發(fā)布時間:2024.08.15
蕪湖CE認(rèn)證AGV供應(yīng)商
發(fā)布時間:2024.08.15
視覺導(dǎo)航是在AGV上安裝CCD攝像機,AGV在行駛過程中通過視覺傳感器采集圖像信息,并通過對圖像信息的處理確定AGV的當(dāng)前位置。視覺導(dǎo)航方式具有路線設(shè)置靈活、適用范圍廣、成本低等優(yōu)點。但是,由于利用車...
-
蚌埠色帶導(dǎo)航AGV特點
發(fā)布時間:2024.08.14
近年來,隨著智能制造的快速發(fā)展,越來越多的生產(chǎn)、制造型企業(yè)也加快了升級改造的步伐。柔性化、自動化的生產(chǎn)線及倉儲物流系統(tǒng)受到眾多企業(yè)的青睞。AGV是柔性生產(chǎn)線和智能倉儲物流系統(tǒng)的關(guān)鍵設(shè)備之一,具有自動化...
-
 泰州商用AGV供應(yīng)商
發(fā)布時間:2024.08.14
泰州商用AGV供應(yīng)商
發(fā)布時間:2024.08.14
AGV在物流行業(yè)中有著廣泛的應(yīng)用。它可以用于貨物的搬運、裝卸、存儲等工作。在倉庫中,AGV可以自動將貨物從一個位置轉(zhuǎn)移到另一個位置,實現(xiàn)快速、準(zhǔn)確的物流操作。在生產(chǎn)線上,AGV可以協(xié)助完成物料供應(yīng)、零...
-
 靜安區(qū)商用AGV設(shè)備廠家
發(fā)布時間:2024.08.13
靜安區(qū)商用AGV設(shè)備廠家
發(fā)布時間:2024.08.13
光學(xué)導(dǎo)航是在AGV的行駛路徑上涂漆或粘貼色帶,通過對攝像機采入的色帶圖像信號進行簡單處理而實現(xiàn)自動導(dǎo)引。該導(dǎo)航方式分為色帶跟蹤導(dǎo)航、二維碼識別等功能。光學(xué)導(dǎo)航技術(shù)成熟,應(yīng)用也較為***。目前,亞馬遜應(yīng)...
-
 青浦區(qū)激光導(dǎo)航AGV生產(chǎn)企業(yè)
發(fā)布時間:2024.08.12
青浦區(qū)激光導(dǎo)航AGV生產(chǎn)企業(yè)
發(fā)布時間:2024.08.12
隨著智能制造的發(fā)展,工廠智能化已成為必然趨勢,無人搬運車(AutomatedGuidedVehicle,簡稱AGV)作為自動化運輸搬運的重要工具,近年來的應(yīng)用越來越***。很多制造和倉儲物流都考慮使用...
-
 舟山磁導(dǎo)航AGV排名
發(fā)布時間:2024.08.12
舟山磁導(dǎo)航AGV排名
發(fā)布時間:2024.08.12
1.提升生產(chǎn)效率:AMR(自主移動機器人)在生產(chǎn)線上的應(yīng)用可以幫助實現(xiàn)自動化生產(chǎn),提升生產(chǎn)效率。通過使用AMR機器人,可以實現(xiàn)物料的自動搬運、裝配線的自動化操作以及生產(chǎn)線的自動調(diào)度等功能,從而減少...
-
馬鞍山智能AGV供應(yīng)商
發(fā)布時間:2024.08.11
慣性導(dǎo)航:慣性導(dǎo)航是在AGV上安裝陀螺儀,利用陀螺儀可以獲取AGV的三軸角速度和加速度,通過積分運算對AGV進行導(dǎo)航定位,慣性導(dǎo)航優(yōu)點是成本低,短時間內(nèi)精度高,但這種導(dǎo)航方式缺點也特別明顯,陀螺儀本身...
-
舟山智能AGV商家
發(fā)布時間:2024.08.11
AGV(自動導(dǎo)引車)是一種智能化的物流設(shè)備,以下為AGV的生產(chǎn)制造工藝流程。1、AGV的設(shè)計與開發(fā)階段。在這一階段,需要制定自動導(dǎo)引車的功能需求、外觀設(shè)計、智能系統(tǒng)等。通過與客戶的溝通,確定AGV的用...
-
蕪湖激光導(dǎo)航AGV特點
發(fā)布時間:2024.08.10
中國AGV行業(yè)展望1、AGV將在制造業(yè)進一步普及和應(yīng)用在制造業(yè)中,AGV將能夠更好地適應(yīng)復(fù)雜的產(chǎn)品和生產(chǎn)環(huán)境,將進一步普及和應(yīng)用。在物流業(yè)中,AGV將進一步提高倉儲和配送的效率,將能夠更好地滿足快速發(fā)...
-
宿遷AGV供應(yīng)商
發(fā)布時間:2024.08.09
激光導(dǎo)航是在AGV行駛路徑的周圍安裝激光反射板,AGV通過發(fā)射激光束,同時采集由反射板反射的激光束,來確定其當(dāng)前的位置和方向,并通過連續(xù)的三角幾何運算來實現(xiàn)AGV的導(dǎo)航。激光導(dǎo)航技術(shù)優(yōu)點:AGV定位精...
-
福建激光導(dǎo)航AGV種類
發(fā)布時間:2024.08.09
AGV小車的方案需根據(jù)客戶的實際應(yīng)用場景來進行定制,以滿足生產(chǎn)需求和擴容需求。需要對應(yīng)用場景做如下分析:運輸環(huán)境:物料運輸環(huán)境對AGV的選型有很大的影響,無論是室內(nèi)和室外、高溫高濕、冷藏還是暗房等等,...
-
 揚州商用AGV商家
發(fā)布時間:2024.08.09
揚州商用AGV商家
發(fā)布時間:2024.08.09
激光導(dǎo)航是在AGV行駛路徑的周圍安裝激光反射板,AGV通過發(fā)射激光束,同時采集由反射板反射的激光束,來確定其當(dāng)前的位置和方向,并通過連續(xù)的三角幾何運算來實現(xiàn)AGV的導(dǎo)航。激光導(dǎo)航技術(shù)優(yōu)點:AGV定位精...
-
嘉興工業(yè)AGV一般多少錢
發(fā)布時間:2024.08.09
3、AGV的裝配階段。這個階段包括電氣系統(tǒng)的安裝、傳動系統(tǒng)的安裝以及各種傳感器和控制設(shè)備的安裝。在裝配過程中,需要精確調(diào)整各個部件的位置和安裝角度,保證AGV運行時的穩(wěn)定性和精度。同時,還需對裝配完成...
-
徐州商用AGV供應(yīng)商
發(fā)布時間:2024.08.09
AGV(自動導(dǎo)引車)是一種自動化物流設(shè)備,廣泛應(yīng)用于工業(yè)和倉儲領(lǐng)域。它是一種能夠自主導(dǎo)航、運輸物品的無人駕駛車輛。AGV具備多種功能和特點。首先,它可以根據(jù)預(yù)設(shè)的路徑和任務(wù)進行自主導(dǎo)航,無需人工干預(yù)。...
-
馬鞍山商用AGV供應(yīng)商
發(fā)布時間:2024.08.08
衡量AGV性能好壞的主要指標(biāo)有:導(dǎo)航系統(tǒng)、驅(qū)動裝置、轉(zhuǎn)向裝置、精確停車裝置、運動控制器、蓄電池和充電系統(tǒng)、通訊裝置、移栽裝置等。在對AGV進行選型前,我們需要對現(xiàn)場物料情況進行詳細(xì)的了解,主要在以下幾...
-
安徽磁導(dǎo)航AGV對比
發(fā)布時間:2024.08.08
AGV(自動導(dǎo)引車)是一種自動化物流設(shè)備,廣泛應(yīng)用于倉儲和物流行業(yè)。它采用導(dǎo)航系統(tǒng)和傳感器技術(shù),能夠自主地在工作區(qū)域內(nèi)移動和執(zhí)行任務(wù),無需人工干預(yù)。AGV具有多種功能和優(yōu)勢。首先,它能夠減少人力成本,...
-
湖州防爆AGV對比
發(fā)布時間:2024.08.08
AGV(自動導(dǎo)引車)是一種自動化物流設(shè)備,廣泛應(yīng)用于倉儲和物流行業(yè)。它采用先進的導(dǎo)航技術(shù)和傳感器系統(tǒng),能夠在無人監(jiān)控的情況下自主導(dǎo)航、運輸物品。AGV具有多種功能和優(yōu)勢。首先,它能夠減少人力成本和勞動...
-
江西磁導(dǎo)航AGV設(shè)備廠家
發(fā)布時間:2024.08.08
主要涉及三大技術(shù)要點:1.定位定位是確定AGV在工作環(huán)境中相對于全局坐標(biāo)的位置及航向,是AGV導(dǎo)航導(dǎo)引的**基本環(huán)節(jié)。2.環(huán)境感知與建模為了實現(xiàn)AGV自主移動,需要根據(jù)多種傳感器識別多種環(huán)境信息:如道...
-
寧波UL認(rèn)證AGV對比
發(fā)布時間:2024.08.08
AGV操作注意事項只有經(jīng)過專業(yè)培訓(xùn)的人員才有資格操作AGV切勿超載運行AGV。裝車時不準(zhǔn)人貨同裝當(dāng)車輛故障不能行駛或在特殊工況下不能行駛,需要用外力移動車輛時,必須將鑰匙開關(guān)關(guān)閉,使整車處于無電狀態(tài),...
-
浦東新區(qū)重載AGV供應(yīng)商
發(fā)布時間:2024.08.07
AGV(自動導(dǎo)引車)是一種自動化物流設(shè)備,廣泛應(yīng)用于工業(yè)和倉儲領(lǐng)域。它是一種能夠自主導(dǎo)航、運輸物品的無人駕駛車輛。AGV具備多種功能和特點。首先,它可以根據(jù)預(yù)設(shè)的路徑和任務(wù)進行自主導(dǎo)航,無需人工干預(yù)。...
-
嘉定區(qū)二維碼導(dǎo)航AGV一般多少錢
發(fā)布時間:2024.08.07
三、崗位主要危險有害因素(危險源)作業(yè)活動主要危險有害因素可能造成的事故/傷害可能傷害的對象AGV使用電氣操作電氣線路絕緣不良觸電操作人員和周邊人員設(shè)備操作車輛移動機械傷害操作人員和周邊人員作業(yè)人員機...
-
南通商用AGV特點
發(fā)布時間:2024.08.07
三、崗位主要危險有害因素(危險源)作業(yè)活動主要危險有害因素可能造成的事故/傷害可能傷害的對象AGV使用電氣操作電氣線路絕緣不良觸電操作人員和周邊人員設(shè)備操作車輛移動機械傷害操作人員和周邊人員作業(yè)人員機...
-
浦東新區(qū)防爆AGV一般多少錢
發(fā)布時間:2024.08.07
無反射板激光自主導(dǎo)航技術(shù)是艾吉威機器人自主研發(fā)的,獲得國家發(fā)明專利。該導(dǎo)航技術(shù)無需安裝反射板即可實現(xiàn)激光導(dǎo)航AGV小車的定位和避障,其特征在于:無需輔助導(dǎo)航標(biāo)志,快速自建地圖,柔性程度高,可適應(yīng)布局變...
-
南京工業(yè)AGV種類
發(fā)布時間:2024.08.07
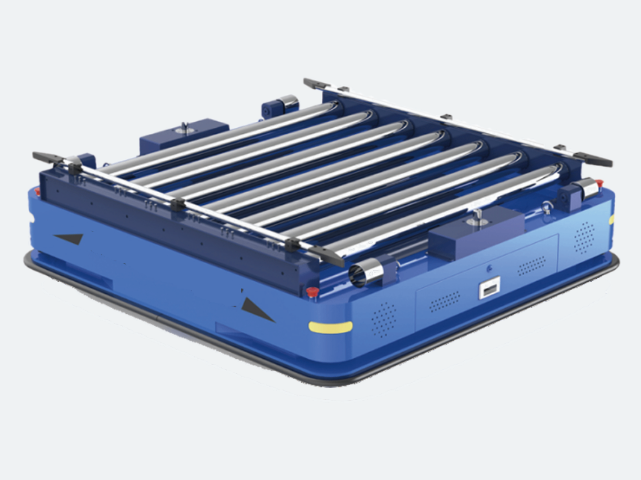
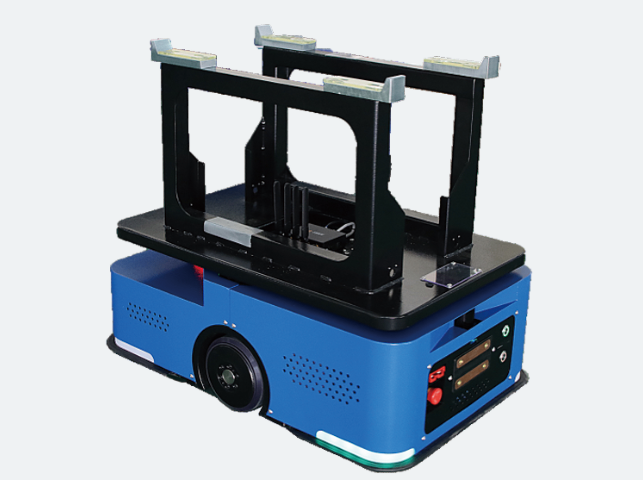
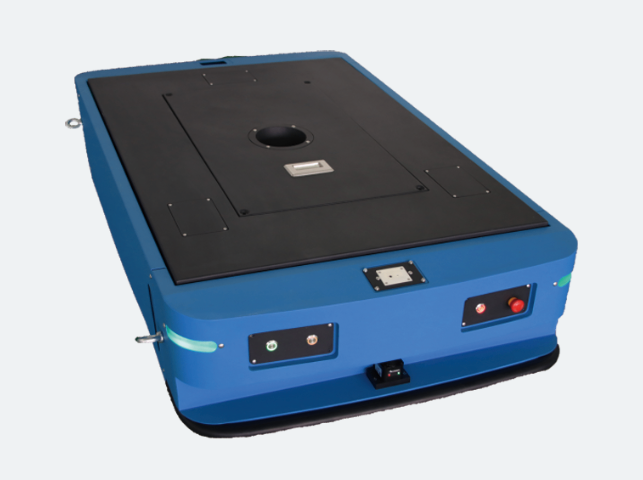
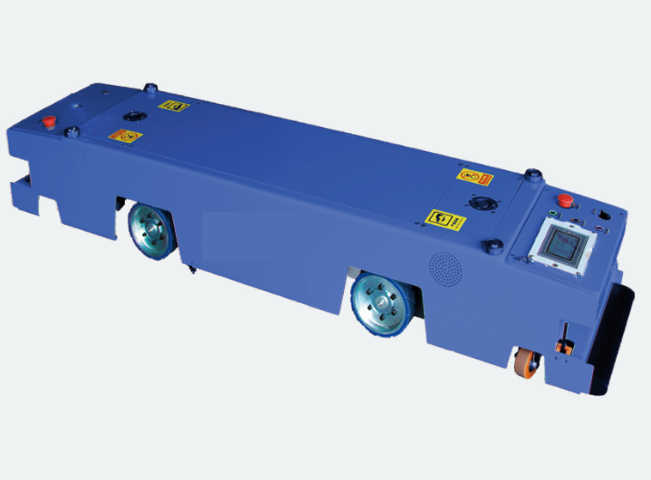
AGV(AutomatedGuidedVehicles)的分類可以從多個角度進行,包括車型形式、導(dǎo)航方式、驅(qū)動方式、移載方式(執(zhí)行機構(gòu)或用途)、控制形式、承載重量、室內(nèi)外應(yīng)用以及應(yīng)用領(lǐng)域等。以下是AG...
-
 楊浦區(qū)AGV怎么樣
發(fā)布時間:2024.08.06
楊浦區(qū)AGV怎么樣
發(fā)布時間:2024.08.06
隨著科技的不斷進步和智能制造的興起,AGV無人車技術(shù)正成為推動智能制造升級的重要力量。AGV(AutomatedGuidedVehicle)無人車是一種能夠自主導(dǎo)航、無需人工干預(yù)的智能運輸工具...
-
南通色帶導(dǎo)航AGV
發(fā)布時間:2024.08.06
一、適用范圍本規(guī)程適用AGV使用人員的安全操作。操作人員應(yīng)遵守《安全生產(chǎn)總則》、《設(shè)備操作規(guī)程》。二、崗位安全作業(yè)職責(zé)1.負(fù)責(zé)本崗位AGV日常開關(guān)機上線,AGV充電,應(yīng)用軟件開啟,相關(guān)必要的點檢。2....
-
南通色帶導(dǎo)航AGV商家
發(fā)布時間:2024.08.06
AGV(AutomatedGuidedVehicles)的分類可以從多個角度進行,包括車型形式、導(dǎo)航方式、驅(qū)動方式、移載方式(執(zhí)行機構(gòu)或用途)、控制形式、承載重量、室內(nèi)外應(yīng)用以及應(yīng)用領(lǐng)域等。以下是AG...
-
無錫UL認(rèn)證AGV優(yōu)勢
發(fā)布時間:2024.08.06
路徑規(guī)劃是導(dǎo)航的一個重要環(huán)節(jié)。AGV根據(jù)環(huán)境的變化,對環(huán)境信息進行收集和分析,按照某一性能進行搜索,進而找出從起點到目標(biāo)點的比較好無碰撞路徑或次優(yōu)無碰撞路徑;能夠處理環(huán)境模型中的不確定因素和路徑跟蹤中...