新聞中心 - 南京熙岳智能科技有限公司
-
 北京什么是智能采摘機器人
北京什么是智能采摘機器人采摘機器人的價值創造體現在多維效果矩陣中。經濟效益方面,西班牙柑橘機器人的ROI(投資回報率)模型顯示,在規模化應用場景下,5年周期內的凈現值可達初始投資的2.8倍;環境效益上,英國草莓機器人通過精細...
發布時間:2025.04.14 -
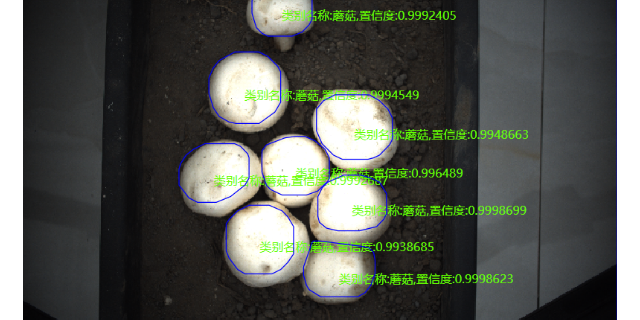 浙江ccd視覺檢測機
浙江ccd視覺檢測機這項技術的應用范圍廣,涵蓋了各個行業的零件生產。無論是汽車制造、電子設備還是航空航天,都離不開高質量的零件。零件瑕疵機器視覺檢測技術能夠幫助企業提前發現和解決生產過程中的質量問題,避免因瑕疵零件引發的...
發布時間:2025.04.14 -
 安徽供應智能采摘機器人制造價格
安徽供應智能采摘機器人制造價格針對不同果園的復雜地形,采摘機器人發展出多樣化的環境適應策略。在山地果園,機器人采用履帶式底盤配合陀螺儀穩定系統,可在30°坡度地面穩定行進。對于密集型種植模式,搭載可伸縮機械臂的機器人能穿越狹窄行距...
發布時間:2025.04.13 -
江西果實智能采摘機器人用途
在全球化與老齡化雙重夾擊下,農業勞動力短缺已成為全球性問題。據糧農組織統計,全球農業勞動力平均年齡已達45歲,年輕人口流失率超過30%。智能采摘機器人的出現,正在重構傳統"面朝黃土背朝天"的生產模式。...
發布時間:2025.04.13 -
 天津品質智能采摘機器人價格低
天津品質智能采摘機器人價格低采摘機械臂的進化方向是兼具剛性承載與柔**互的仿生設計。德國宇航中心開發的"果林七軸臂"采用碳纖維復合管結構,臂展達3.2米,末端定位精度±0.5毫米,可承載15公斤載荷。其關節驅動采用基于果蠅肌肉原...
發布時間:2025.04.13 -
山東草莓智能采摘機器人性能
未來蘋果采摘機器人將向認知智能方向深度進化,其在于構建農業領域知識圖譜。通過融合多模態傳感器數據(視覺、光譜、觸覺、聲紋),機器人可建立包含果樹生理周期、病蟲害演化、氣候響應等維度的動態知識模型。例如...
發布時間:2025.04.12 -
天津供應智能采摘機器人功能
智能采摘機器人能源系統搭載自適應功率模塊,根據負載實時調節電機輸出。在平坦地形,系統切換至節能模式,功耗降低40%;遇到坡地時,超級電容瞬間釋放能量,確保動力連續性。某型號機器人的氫燃料電池版,通過余...
發布時間:2025.04.12 -
江西桃子智能采摘機器人公司
蘋果采摘機器人作為農業自動化領域的前列設備,其技術架構融合了多學科前沿成果。主要系統由三維視覺感知模塊、智能機械臂、柔性末端執行器及運動控制系統構成。視覺模塊采用多光譜成像技術與深度學習算法,可實時識...
發布時間:2025.04.11 -
 廣東草莓智能采摘機器人功能
廣東草莓智能采摘機器人功能未來蘋果采摘機器人將向認知智能方向深度進化,其在于構建農業領域知識圖譜。通過融合多模態傳感器數據(視覺、光譜、觸覺、聲紋),機器人可建立包含果樹生理周期、病蟲害演化、氣候響應等維度的動態知識模型。例如...
發布時間:2025.04.11 -
 上海智能采摘機器人技術參數
上海智能采摘機器人技術參數未來采摘機器人將突破單機智能局限,向群體協作方向演進。基于聯邦學習的分布式決策框架將實現機器人集群的經驗共享,當某臺機器人在葡萄園中發現特殊病害特征,其學習到的識別模式可即時更新至整個網絡。數字孿生技...
發布時間:2025.04.10 -
 吉林水果智能采摘機器人制造價格
吉林水果智能采摘機器人制造價格智能采摘機器人采用模塊化設計,主要部件壽命達5萬小時,通過預測性維護使故障率降低65%。在種植淡季,設備可快速轉型為植保機器人,搭載變量噴霧系統實現精細施藥。某企業開發的二手設備交易平臺,使殘值率達4...
發布時間:2025.04.10 -
 山東智能采摘機器人品牌
山東智能采摘機器人品牌可持續發展將成為采摘機器人進化的重要維度。在能源層面,柔性光伏薄膜與仿生樹枝形太陽能收集裝置正在研發中,使機器人能利用果樹間隙光照進行自主補能。麻省理工學院媒體實驗室展示的"光合機器人"原型,其表面覆...
發布時間:2025.04.10